3-4 Consider the two-link manipulator of Figure 3.25, which has joint 1 revolute and joint 2 pris...
I've rated my last 10 answers ❤
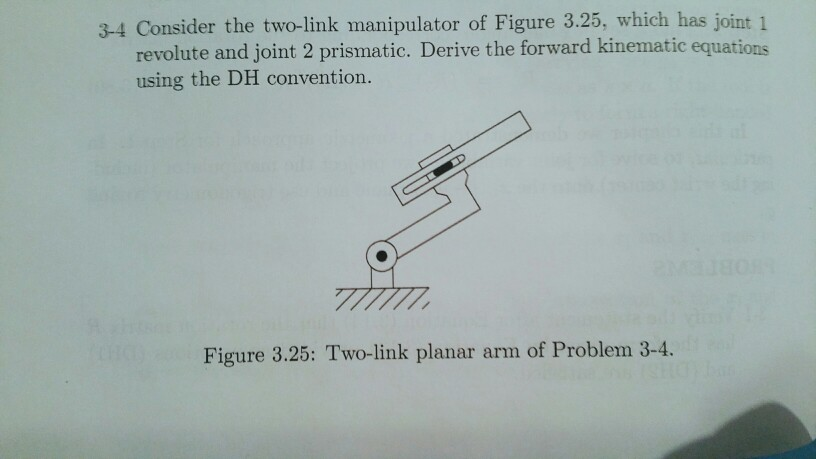
3-4 Consider the two-link manipulator of Figure 3.25, which has joint 1 revolute and joint 2 prismatic. Derive the forward kinematic equations using the DH convention. Figure 3.25: Two-link planar arm of Problem 3-4.
Solved
Mechanical Engineering
1 Answer
Muhammad Raheel Goher
Login to view answer.